
들어가기
S03 EP07
혹시 자율주행 관련 기업들의 홍보나 관련 자료를 접하실 기회가 있으셨나요? 저는 나름 다양한 기업과 기관의 자료를 접하고 있습니다. 이런 자료 중에서 특히 홍보와 관련된 자료에서 빠지지 않고 등장하는 단어가 있습니다. 눈치가 빠르신 분들은 아실 것 같습니다. 바로 “안전(Safety)” 라는 단어입니다. 자율주행 기술을 개발하면서 ‘안전’ 이라는 단어를 빼고 홍보를 하는 기업은 본적이 없었던 것 같습니다. 대표적인 자율주행 기술 개발 기업의 경우는 안전을 위한 별도 임원이 있기도 하고, 기업들이 추구하는 안전에 대한 철학을 다양한 방법으로 공유하기도 합니다. 특히 미국의 기업들이 그렇게 하려고 노력 중에 있습니다.
그럼 왜 이렇게까지 안전에 대해 강조를 할까요? 뭐, 단순히 생각하면 자동차는 안전해야 한다는 절대 바뀔 수 없는 전제가 있기 때문이 아닐까 합니다. 자율주행차 등장의 다양한 이유 중에서 안전을 위협하는 사람들의 운전 행위를 없애기 위해 운전석에서 사람을 빼내는 것이 있습니다. 그만큼 현재 사람이 운전하는 자동차가 위험하다는 것으로 생각하는 것이라 있습니다. 그리고 어느 정도 이해가 되는 부분도 있습니다. 그래서 사람이 없는 자율주행차는 안전해야 한다는 전제를 가지고 시작하게 됩니다. 물론 이 접근에 많은 논란이 있고, 논의가 필요하기는 합니다. 간단히 얼마나 안전해야 안전하다고 인정해줄 것인지에 대한 것이 핵심입니다.
이번 에피소드에서는 이러한 자율주행차의 안전을 위해 기술 개발 기업들이 적용하고 있는 기술에 대해서 한 번 소개를 할까 합니다. 물론 자율주행차에 대해 관심이 있으신 분들이라면 한 번 정도는 들어 보신 적이 있으신 내용일 수 있습니다.

자율주행차 인지
(Perception)
자율주행차는 사람 대신 운전을 해야 하기 때문에 사람의 역할을 할 수 있는 기능들을 가지고 있어야 합니다. 그 중에서 가장 먼저 가지고 있어야 하는 것이 자동차 주변을 봐야(See) 합니다. 주변을 확인해야 그 다음 단계인 예측, 계획, 제어가 가능하기 때문입니다. 한 마디로 운전은 눈 뜨고 해야 한다는 의미입니다. 가장 대표적으로 카메라, 레이더, 라이다라는 센서가 있습니다. 그리고 IMU, GPS 등등 기본적인 센서들도 있습니다.[1]
이번 에피소드에서는 그 중에서 나름 주목해 볼만한 센서 몇 가지를 소개할까 합니다. 기존의 센서에 기능적으로 추가된 것도 있고, 완전히 다른 분야의 기술을 도입한 것도 있습니다. 이런 새로운 센서들의 고민은 결국 보다 더 안전한 주행을 위한 새로운 기술이라고 할 수 있습니다.
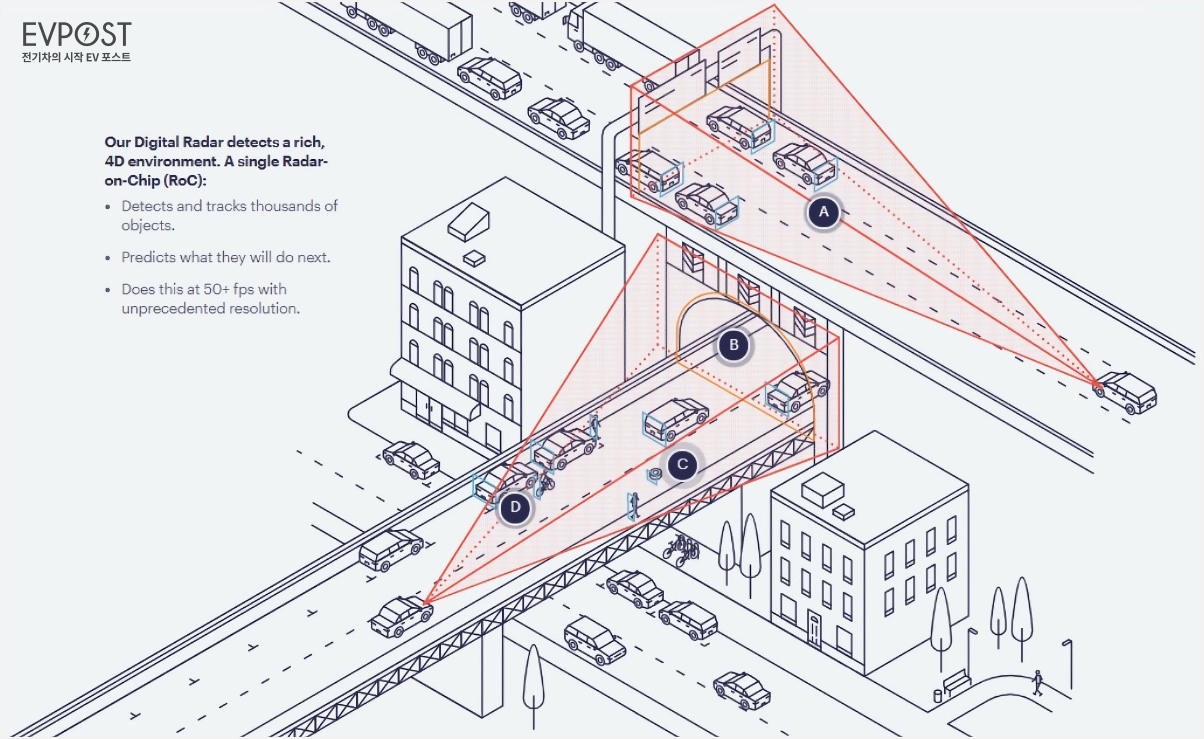
4D 이미징 레이더
(4D Imaging Radar)
레이더는 이미 현재 운행되는 자동차에도 포함되어 있는 센서입니다. 현재 사용 중인 레이더는 우리가 아는 그냥 레이더입니다. 하지만 현재는 단순 물체의 유무만을 파악하는 것이라면 4D 레이더는 물체의 움직임까지도 파악을 목적으로 하고 있습니다. 기업마다 부르는 이름이 다르지만 보통은 ‘4D 이미징 레이더’로 부릅니다.
기존의 레이더 기능에 소프트웨어가 포함되면서 물체의 실시간 정보를 입체적으로 확인을 할 수 있습니다. 4D 이미징 레이더는 레이더가 가지고 있는 특징은 날씨와 환경에 크게 영향을 받지 않는 큰 장점을 가지고 있습니다. 카메라와 라이다가 가지고 있는 약점을 극복할 수 있습니다. 이런 장점에 라이다가 가지고 있는 가장 큰 약점이라고 하는 가격 경쟁력 부분에서 우위를 가지고 있기도 합니다. 이런 이유로 현재 자동차 제조 기업들은 4D 레이더를 실제 차량에 장착하기 위한 준비를 하고 있습니다. 물론 라이다 수준의 해상도를 구현할 수는 없지만 그 대안으로 제시되고 있는 것입니다. 즉 카메라와 라이다의 중간 정도의 결과를 기대할 수 있는 것입니다.

현대 모비스도 최근 미국의 4D 이미징 레이더 개발 기업인 Zendar에 투자를 결정했습니다.[2] 기존에 가지고 있던 레이더도 없앤 테슬라도 몇 년 전에는 4D 레이더 장착을 고민한 적도 있습니다.[3] 그리고 주요 자동차 부품 기업들도 기술 개발을 하고, 제품 판매를 하고 있습니다. 현재 자동차 제조 기업들은 라이다를 조기 투입할지, 4D 레이더를 거쳐갈지에 대한 고민을 하고 있을 것 같습니다. 물론 고급 차량에는 라이다, 중저가 차량에는 4D 레이더를 장착하는 것을 생각하고 있을 수도…
열화상 카메라
(Thermal Camera)
카메라로 요약되는 컴퓨터 비전(Computer Vision) 기술은 자율주행 기술의 발전에 가장 주요한 기술입니다. 한 마디로 사람의 눈 역할(See)과 가장 가깝기 때문입니다. 테슬라는 현재 카메라를 통해 자율주행 기술 구현을 위해 노력 중에 있습니다. 반면 대부분의 레벨 4 자율주행 기술을 개발하고 있는 기업들은 보다 많은 센서를 추가하는 노력을 하고 있습니다.
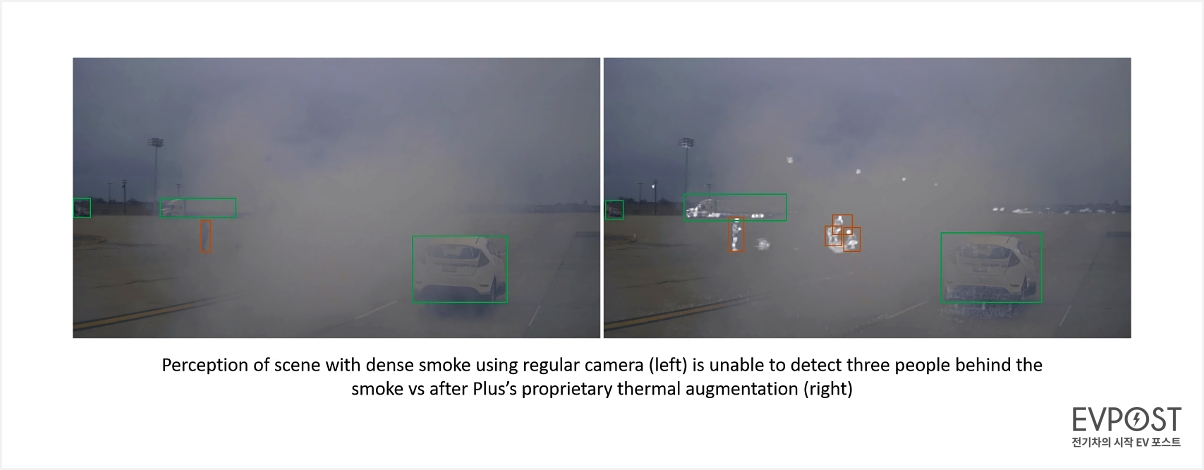
그리고 조금 더 많이 신경을 쓰는 기업이라면 열화상 카메라를 자신들의 시스템에 추가하기도 합니다. 사람이 운전을 할 때 가장 어려운 것은 바로 시야 확보가 어려운 상황을 만났을 때가 아닐까 합니다. 엄청난 비가 오거나 안개가 짙게 끼었을 때가 아닐까 합니다. 그리고 야간 운전도 포함이 될 것입니다. 그럼 이 두가지가 동시에 일어난 상황에서 운전을 하는 것은 결코 쉽지 않습니다. 카메라만 가지고 이런 상황에서 운전을 하는 것은 그렇게 완벽하다 할 수 없습니다. 혹시나 해서 다시 언급을 하면 현재 자동차들은 레벨 2 수준의 ADAS 기술이 적용되어 있습니다. 즉 운전자가 있습니다. 하지만 레벨 4 이상의 자율주행차는 사람이 제어할 수 있는 수단이 없습니다. 완전히 로봇에게 운전을 맡겨야 합니다.

이런 어려움을 극복하기 위해서 등장한 기술이 열화상 카메라입니다. 코로나 초기에 건물 입구에 있던 그 카메라입니다. 즉 물체의 온도를 측정해서 물체의 유무를 파악하는 것입니다. 사람의 안전을 우선적으로 판단해야 하는 측면에서 잘 보이지 않는 외부의 사람의 움직임을 파악할 수 있는 좋은 수단이라고 할 수 있습니다. Zoox, Plus, Nuro 등의 기업들은 이미 테스트에 열화상 카메라를 도입하고 있습니다.[4]
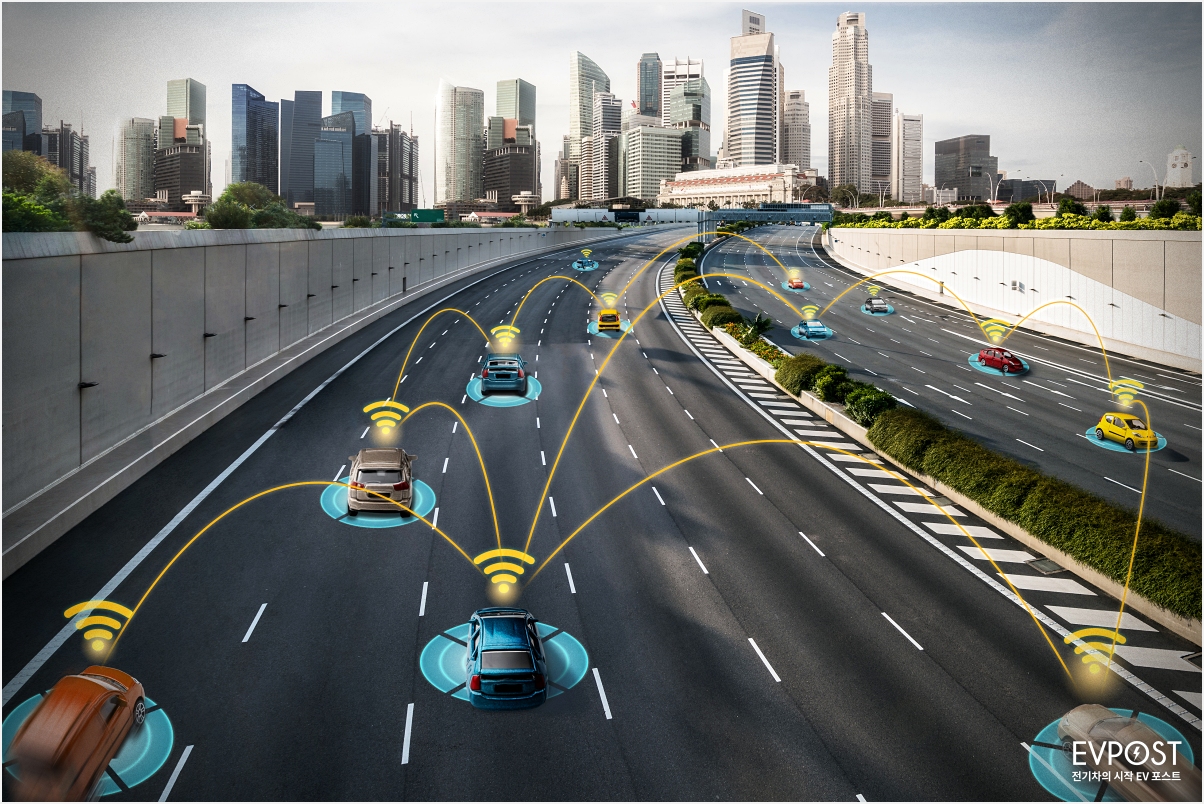
C-V2X
(Cellular Vehicle to Everything)
지금은 아니지만 몇 년 전까지만 해도 많은 분들이 통신사들이 자율주행차를 만들 수 있다는 생각을 할 정도로 통신사들은 자율주행 기술에 대해 광고를 많이 했습니다. 평창 올림픽에서 KT가 현대자동차와 경쟁을 한다는 뉴스도 있었습니다.[5] 하지만 현재는 그런 광고는 많이 볼 수 없습니다. 당시에는 5G 통신 기술의 적용을 위한 마케팅 전략이 컸었습니다.
그럼 왜 통신사들은 자율주행차에 관심을 가졌을까요? 바로 자율주행차가 가지고 있는 짧은 인지 능력에 대한 대안으로 소개를 했기 때문입니다. 초기 자율주행차들은 대부분 자동차 자체에 장착된 센서들의 데이터를 가지고 운행을 했습니다. (현재도 일반적으로는 그렇습니다.) 하지만 자동차의 보다 더 안전한 주행을 위해서 조금 더 먼 거리에 있는 정보에 대해서 관심을 가지게 되었습니다. 그리고 당시에도 존재했던 기술인 V2X에 관심을 가졌습니다. 당시 V2X 기술은 WiFi 기술의 확장으로 자동차 주변 장치와의 통신 기술이었습니다.[6] 하지만 5G 기술이 전세계적으로 적용이 되어가고 통신망이 구축되면서 점점 더 휴대폰 통신 기술이 적용된 V2X 기술이 영향력을 확대해 가고 있습니다.

중국은 초기부터 C-V2X 기술을 채택해서 현재 중국의 자율주행 기술 개발 기업들은 C-V2X 기반의 자율주행 기술을 선보이고 있습니다. 또한 미국도 기존의 V2X에 할당했던 주파수를 C-V2X로 변경을 한 상황입니다. (아직 논란이 있기는 합니다.) EU 도 기존의 V2X 기술을 C-V2X을 고려할 수 있도록 기술 선정을 미루었습니다.
아직은 본격적으로 자율주행차가 도로에 등장을 하지 못해서 V2X 기술 역시 많이 적용이 되고 있지 않습니다. 하지만 보다 더 안전한 운전을 위해 보다 넓은 범위 정보를 얻기 위해 필수라고 여겨지는 C-V2X 기술은 조용히 그 영향력을 확대해 가고 있습니다. 더불어 현재 이런 통신 기술의 적용은 커넥티드 차라는 이름으로 상업적 사용을 위해 우선적으로 적용되고 있습니다. 간단한 예로 자동차에서 바로 결제를 할 수 있는 시스템을 생각하시면 됩니다. 참고로 현대자동차, 기아도 기간통신사업자(이동통신 재판매) 사업자로 등록되어 있습니다.

 또 하나, 중요한 사실…
또 하나, 중요한 사실…
청소(Cleaning)
아무리 좋은 성능의 센서를 가지고 있는 자율주행차라고 해도 센서에 문제가 생긴다면 제대로 운행을 할 수 없을 것입니다. 내부적으로 고장이 나게 된다면 시스템적으로 감지를 하고 대응을 할 수 있도록 설계가 필요할 것입니다. 실제로 자동차 제조 기업들은 이런 시스템 디자인을 하고 있습니다.
그런 내부적인 고장이 심각한 상황을 만들 수도 있지만, 외부로 노출된 센서에 이물질이 묻었을 경우에 대한 대비도 해야 하는 것이 자율주행차 개발을 하는 기업들의 고민입니다. 뭐, 우리가 흔히 경험할 수 있는 여름철 수많은 벌레들, 비 오는 날 흙탕물의 진흙, 지나가는 새들의 새똥 등 자율주행차의 눈을 가리는 상황들은 발생할 것입니다.
이런 문제를 해결하기 위해서 기업들은 다양한 방법을 고민하고 적용하고 있습니다. 어쩌면 아주 원초적인 문제 해결을 해야 하는 물리적인 방식이 도입되고 있습니다. 하지만 실제 자동차 설계 단계에서부터 센서들이 영향을 덜 받을 수 있는 자동차 외부 디자인에 대한 고민도 역시 하고 있습니다. 이런 이유로 자동차 센서를 개발하는 기업들은 작은 크기와 여러 센서가 통합된 모듈을 개발하는 노력을 하고 있습니다. 혹시, 테슬라의 카메라가 어디어디 있는지 아시나요? 테슬라는 총 8개의 카메라가 장착되어 있습니다. ^^
 나오기
나오기
자율주행차 발전에서 반드시 언급되는 기술은 AI 입니다. 그리고 그 중심에는 사람의 눈을 대신할 수 있는 Computer Vision(CV) 기술이 있습니다. 기존에 카메라가 단순히 순간을 저장하는 역할이었다면 CV 기술이 발전하면서 판단이라는 중요한 기능을 가지게 되었습니다. 자율주행차는 이런 CV 를 기반으로 주변을 이해할 수 있게 되었고, 그 정보를 기반으로 자동차를 움직일 수 있게 했습니다.
아직도 카메라만을 가지고 자율주행 기술을 개발하는 기업들은 있습니다. 테슬라 자율주행 기술의 핵심 센서는 카메라입니다. 하지만 초기 자율주행차 개발자들은 카메라가 가지고 있는 한계를 극복하기 위해서 레이더(Radar), 라이다(LiDAR)로 대표되는 센서를 함께 사용하면서 보다 더 많은 정보를 수집하고, 보다 더 안전한 주행을 할 수 있도록 노력을 해오고 있습니다. 물론 카메라의 정확한 도로 정보 인지를 위해 도로 표지판, 신호와 구분선의 분명한 표시를 위한 기술과 일관성에 대한 규제에 대한 노력도 중요합니다.
아직 자율주행 기술은 발전하고 향상되고 있습니다. 그리고 어떤 방식이 대세라고 할 수 있을 정도로 구현이 되고 있지 않습니다. 개별 기업이 추구하는 자율주행 기술의 최종 목적에 따라 사용하는 기술도 달라집니다. 어쩌면 현재의 기술은 향후에 등장할 새로운 기술로 대체가 될 수도 있습니다. 하지만 분명한 것은 하나의 센서가 아닌 다양한 센서에서 수집된 정보를 얼마나 빠르고 제대로 분석하고 해석해서 자동차 제어에 사용을 할 것인지가 기술 개발의 핵심에 있다고 할 수 있습니다. 그리고 그러한 기술 개발은 “안전” 이라는 거대한 목표를 향해 가고 있다는 것입니다.
Over the Vehicle !!!
참고 자료
[1] EVPOST – 자율주행차가 세상을 보는 방법은 여러가지이다.
[2] https://www.mobis.co.kr/kr/aboutus/press.do?category=press&idx=5248
[3] https://electrek.co/2020/10/22/tesla-4d-radar-twice-range-self-driving/
[4] https://blog.naver.com/soyose1/222505066326
[5] https://www.etoday.co.kr/news/view/1564612
[6] EVPOST – 자동차 센서는 완전히 믿음을 주지 못한다.
 OTV
OTV
Over the Vehicle
자율주행차 그 이상의 가치




